Raptor-Training: Difference between revisions
No edit summary |
|||
| Line 4: | Line 4: | ||
|style = "width:1000px;"| | |style = "width:1000px;"| | ||
[[File:Red_border_raptor_stamp.png|noframe|right|500px]] | [[File:Red_border_raptor_stamp.png|noframe|right|500px]] | ||
Raptor Training, created by our team of experienced controls engineers, provides hands-on experience which enables the new practitioner to gain familiarity with the toolchain by building, deploying, calibrating | Raptor Training, created by our team of experienced controls engineers, provides hands-on experience which enables the new practitioner to gain familiarity with the toolchain by building, deploying, calibrating and refining a real-world control application. | ||
Revision as of 18:46, 2 February 2023
New Eagle > Products Wiki > Raptor Platform > Raptor-Training
 Raptor Training, created by our team of experienced controls engineers, provides hands-on experience which enables the new practitioner to gain familiarity with the toolchain by building, deploying, calibrating and refining a real-world control application.
Training OverviewWho?
What? Why? Where?
When?
Training CurriculumThe Raptor Training course is designed to give an understanding of the Raptor Platform in an efficient, hands-on manner. We will start off in the MATLAB/Simulink environment, showing concepts of Raptor-Dev's integration and how to use model based design to your advantage. Once the project is built we will flash the compiled code to the module. Using Raptor-Cal, New Eagle's calibration tool, we will calibrate and test the system. The topics covered in Raptor Training are listed below.
Getting Started
MATLAB/Simulink Introduction
Raptor-Dev
Raptor-Cal
Raptor Hardware
Training PrerequisitesThe following steps should be completed before the Raptor Training course! Special topicsFor on-site training: if you would like Raptor Training to cover any specific topics, please contact sales at least 2 weeks prior to training so we can include additional information and examples. Software RequirementsFollow the instructions below for necessary software installations. More details can be found in the Raptor Getting Started Guide. Operating SystemWindows 7 or later is required. MATLAB and SimulinkPlease Note: MATLAB and Simulink is used throughout training and having a basic understanding of these tools is a necessary requirement for training. To learn more about MATLAB and Simulink: See the Raptor-Training Videos for more tutorials. MATLAB 2017b or later is recommended. The following tools from MathWorks are required:
If you don't have all these MathWorks products, we can help procure a temporary MathWorks trial license for you during your training classes. If you would like one, please follow these instructions:
Raptor-Dev and Raptor-CalRaptor-Dev and Raptor-Cal can be downloaded from software.neweagle.net. If necessary, first create an account and wait for the confirmation email (requests may take up to 2 business days to fulfill). Ensure compatibility between Raptor-Dev and MATLAB using the matrix below.
After installation of Raptor-Dev, the Raptor Configuration Editor will open (alternatively, open it by navigating to Start > Programs > New Eagle > Raptor Configuration Editor). Use this tool to assign Raptor-Dev to the version of MATLAB used for training. Once Raptor-Dev and Raptor-Cal are installed, navigate to the New Eagle License Viewer (Start > Programs > New Eagle > New Eagle License Viewer). If necessary, request a trial license by following the instructions below.
CompilersThe appropriate compiler and associated license will be required.
Kvaser CANKingKvaser CANKing is a free, basic CAN bus monitor. To download, go to the Kvaser downloads page at http://www.kvaser.com/download/. Click on the link to download Kvaser CANKing, and proceed through the installation. Kvaser Database EditorKvaser offers a DBC File creator/editor which can be downloaded from here: Kvaser DBC Editor Download This is required for Video 17. Training DownloadsTraining KitThis section is for all documentation you may need for Raptor Training. The Raptor Training Kit is designed to allow the user to configure hardware, develop software, and create calibrations all within the scope of the Raptor Toolchain.
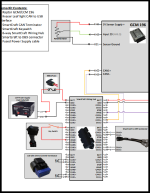
Sample Models/Demo KitsThis section contains the source software for any Demo Kit offered by New Eagle. This includes the source Simulink model and wiring diagrams. Along with the appropriate Raptor Packages, Displays, and Calibrations. The demo kits are recommended to test out the Raptor Toolchain briefly yet effectively. For a more in-depth look, see the training kit options above.
Training VideosVeeCAN TutorialCheck out the link below to watch a Raptor VeeCAN Tutorial to kick start your display development. New Eagle Raptor VeeCAN Tutorial Raptor Online TrainingBelow are all of Raptor Training Videos for this course. Each video builds off of one another, so please follow them in chronological order. For optimal viewing experience view the videos in 1080p, but if need be you can reduce the quality to 720p. Anything lower is not recommended. Please note: The video can be fast paced at time, be prepared to pause and work on small parts of the video at a time if need be. An internet connection is required. Estimated internet usage: 5 GBs+
Experiencing difficulties? Contact our Support Team Video Copyrights: © New Eagle 2018 |