Raptor-Training: Difference between revisions
(Created page with '===Introductory Training=== Raptor Training, led by our team of experienced system engineers, provides hands-on experience which enables the new practitioner to gain familiarity …') |
|||
| (176 intermediate revisions by 12 users not shown) | |||
| Line 1: | Line 1: | ||
{{Navigation}} [[Raptor-Platform | Raptor Platform]] > '''Raptor-Training''' | |||
Raptor Training, | {{DISPLAYTITLE:Raptor-Training}} | ||
{| | |||
|style = "width:1000px;"| | |||
[[File:Red_border_raptor_stamp.png|noframe|right|500px]] | |||
Raptor Training, created by our team of experienced controls engineers, provides hands-on experience which enables the new practitioner to gain familiarity with the toolchain by building, deploying, calibrating and refining a real-world control application. | |||
=Training Overview= | |||
'''Who should attend?''' | |||
* Control Systems Engineers | |||
* Application Engineers | |||
* Embedded Software Engineers | |||
* Technical Program Managers | |||
'''What is covered?'''<br> | |||
The Raptor Training course is designed to give an understanding of the Raptor Platform in an efficient, hands-on manner. This is accomplished by providing a detailed run down of the way eMBD (Embedded Model Based Design) is designed, developed and implemented using the full Raptor Toolchain. | |||
'''Why should I attend?'''<br> | |||
Led by an experienced user of the toolchain, Raptor Training will provide the knowledge required to create your own applications using the full potential of the Raptor Platform. | |||
'''Where is it held?'''<br> | |||
Raptor Training comes in four formats: | |||
* 2-Day Training at New Eagle Headquarters - Ann Arbor, MI | |||
* On-Site Training at your location | |||
* 2-Day Remote Training online | |||
* Web-based video series with optional training kit | |||
'''When is it?''' | |||
* In-house 2-day training sessions are conducted regularly and can be scheduled with our '''[https://neweagle.net/contact/ sales]''' team | |||
: | * On-site training can be scheduled with our '''[https://neweagle.net/contact/ sales]''' team | ||
* 2-Day remote training online sessions are conducted regularly and can be scheduled with our '''[https://neweagle.net/contact/ sales]''' team | |||
: | * The web-based training can be accessed at any time | ||
: | |||
: | |||
::* | ==Training Curriculum== | ||
::* | |||
:: | The Raptor Training course is designed to give an understanding of the Raptor Platform in an efficient, hands-on manner. We will start off in the MATLAB/Simulink environment, showing concepts of Raptor-Dev's integration and how to use model-based design to your advantage. Once the project is built, we will flash the compiled code onto the module. Using Raptor-Cal, New Eagle's calibration tool, we will calibrate and test the system. | ||
:: | |||
:: | The topics covered in Raptor Training are listed below. | ||
:: | |||
:: | [[File:RaptorTrainingAgenda.png|noframe|1000px]] | ||
:: | |||
{|style="width:100%;" | |||
===Getting Started=== | |||
*''Software Installation<br> | |||
*''Licensing<br> | |||
<br> | |||
===MATLAB/Simulink Introduction=== | |||
*''MATLAB Console/Workspace <br> | |||
*''Simulink Block Descriptions <br> | |||
<br> | |||
===Raptor-Dev=== | |||
*''Project Directory Setup<br> | |||
*''Target Definition Blocks<br> | |||
*''Trigger Blocks<br> | |||
*''Measurement and Adjustment Blocks<br> | |||
*''I/O Blocks<br> | |||
*''Fault Management Blocks<br> | |||
*''Data Storage Blocks<br> | |||
*''CAN Blocks<br> | |||
<br> | |||
===Raptor-Cal=== | |||
*''Flashing a Module<br> | |||
*''Online Displays<br> | |||
*''Calibrations<br> | |||
<br> | |||
===Raptor Hardware=== | |||
*''Hardware Description<br> | |||
*''Kit Setup and Testing<br> | |||
|} | |||
=Training Prerequisites= | |||
The following steps should be completed '''before''' the Raptor Training course. | |||
==Special Topics== | |||
For on-site training: If you would like Raptor Training to cover any specific topics, please contact '''[https://www.neweagle.net/contact/ sales]''' at least two weeks prior to training so we can include additional information and examples. | |||
==Software Requirements== | |||
Follow the instructions below for necessary software installations. More details can be found in the '''[[Raptor:Getting_Started|Raptor Getting Started Guide]]'''. | |||
===Operating System=== | |||
Windows 7 or later is required. | |||
===MATLAB and Simulink=== | |||
'''''Please Note:''' MATLAB and Simulink are used throughout training and having a basic understanding of these tools is a necessary requirement for training.'' | |||
To learn more about MATLAB and Simulink: | |||
* '''[https://www.mathworks.com/support/learn-with-matlab-tutorials.html Simulink Training]''' | |||
<!--* '''[https://neweagle.vids.io/videos/4c9bd0bd1212e0c5c4/raptor-training-matlab-introduction Raptor Training Video No. 3:]''' MATLAB and Simulink Intro--> | |||
See the Raptor Training videos for more tutorials. | |||
MATLAB 2017b or later is recommended. The following tools from MathWorks are required: | |||
* MATLAB | |||
* Simulink | |||
* Embedded Coder | |||
* MATLAB Coder | |||
* Simulink Coder | |||
If you don't have all these MathWorks products, we can help procure a temporary MathWorks trial license for you during your training classes. If you would like one, please follow these instructions:<br> | |||
# '''[https://www.neweagle.net/contact/ Contact us]''' at least one week prior to training indicating you would like a MathWorks trial license for training<br> | |||
# We will assign a trial license to you, and you will receive an email when it is available for download<br> | |||
# Click the link in the email to download the trial (if you don't have a MathWorks account, set one up at this time)<br> | |||
# Proceed through the installation | |||
===Raptor-Dev and Raptor-Cal=== | |||
Raptor-Dev and Raptor-Cal can be downloaded from '''[http://software.neweagle.net software.neweagle.net]'''. If necessary, first create an account and wait for the confirmation email (requests may take up to two business days to fulfill). | |||
Ensure compatibility between Raptor-Dev and MATLAB using the matrix below. | |||
[[File:Raptor Compatibility Matrix.PNG|Raptor Compatibility]] | |||
After installation of Raptor-Dev, the Raptor Configuration Editor will open (alternatively, open it by navigating to Start > Programs > New Eagle > Raptor Configuration Editor). Use this tool to assign Raptor-Dev to the version of MATLAB used for training. | |||
Once Raptor-Dev and Raptor-Cal are installed, navigate to the New Eagle License Viewer (Start > Programs > New Eagle > New Eagle License Viewer). If necessary, request a trial license by following the instructions below. | |||
[[File:License viewer new request screenshot.png|350px]] | |||
# Select the settings button<br> | |||
# Click 'New License'<br> | |||
# Fill out the information, and click submit (requests may take up to two business days to fulfill)<br> | |||
# Once request is fulfilled, an email will be sent with update instructions (click Update License Online)<br> | |||
===Compilers=== | |||
The appropriate compiler and associated license will be required. | |||
* The BCM48, CM0711, CM3626, and CM2115 use the '''CodeWarrior for MPC55xx/MPC56xx Microcontrollers V2.10 compiler'''. You can download an evaluation version or purchase the compiler '''[http://www.nxp.com/products/software-and-tools/software-development-tools/codewarrior-development-tools/codewarrior-development-studios/codewarrior-for-microcontrollers/codewarrior-development-studio-for-mpc55xx-mpc56xx-classic-ide-v2.10:CW-MPC55XX_56XX here]'''. | |||
* The CM3620 uses the '''IAR Embedded Workbench for ARM 4.42A''' compiler. To coordinate obtaining an evaluation version of the compiler please contact '''[mailto:support@neweagle.net?Subject=CM3620%20Compiler%20Inquiry New Eagle Support]'''. | |||
* The GCM196 and ECM196 use the '''Hightec Compiler for the Infineon TriCore architecture v3.4.5.11''' compiler. For more information on the GCM196 compiler, and to ensure you get the correct version, please contact '''[mailto:support@neweagle.net?Subject=GCM196%20Compiler%20Inquiry New Eagle Support]'''. | |||
===Kvaser CANKing=== | |||
Kvaser CANKing is a free, basic CAN bus monitor. To download, go to the Kvaser downloads page '''[http://www.kvaser.com/download/ here]'''. Click on the link to download Kvaser CANKing, and proceed through the installation. | |||
===Kvaser Database Editor=== | |||
Kvaser offers a DBC file creator/editor which can be downloaded here: '''[http://www.kvaser.com/software/7330130980860/V2_4_109/kvaser_database_editor_setup.exe Kvaser DBC Editor Download]''' | |||
This is required for '''Video 17'''. | |||
=Training Downloads= | |||
==Training Kit== | |||
This section is for all documentation you may need for Raptor Training. The Raptor Training Kit is designed to allow the user to configure hardware, develop software and create calibrations all within the scope of the Raptor Toolchain. | |||
{| class="wikitable" style="text-align: center;" cellpadding = "5" | |||
!scope="col"| Software Downloads | |||
!scope="col"| Training Supplement | |||
!scope="col"| ETC Demo Kit Software | |||
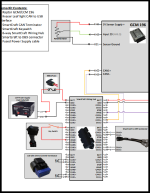
!scope="col"| Training Kit Block Diagram | |||
!scope="col"| Raptor-Cal User Manual | |||
!scope="col"| Training Evaluation Form | |||
|- | |||
|style = "height:180px; width:180px;"| | |||
All the latest Raptor software for training can be found by accessing [http://software.neweagle.net/issues/plugin.php?page=Artifacts/index software.neweagle.net] | |||
|style = "height:180px; width:180px;"| | |||
[[Image:RaptorTrainingSupplement.png|150px|link=http://www.neweagle.net/support/wiki/ProductDocumentation/Raptor/Raptor-Training/RaptorTraining_Supplement.pdf]] | |||
|style = "height:180px; width:180px;"| | |||
[[Image:Raptorfile-training.png|150px|link=http://www.neweagle.net/support/wiki/ProductDocumentation/Raptor/Raptor-Training/RaptorTrainingGCM196.zip]] | |||
|style = "height:180px; width:180px;"| | |||
[[Image:GCMcover.png|150px|link=http://neweagle.net/support/wiki/ProductDocumentation/Raptor/Raptor-Training/DemoKitWiringDiagramsGCM196.pdf]] | |||
|style = "height:180px; width:180px;"| | |||
[[Image:Raptor-Cal_UserManual.jpg|150px|link=http://www.neweagle.net/support/wiki/ProductDocumentation/Raptor/Raptor-Cal/Raptor-Cal_UserManual.pdf]] | |||
|style = "height:180px; width:180px;"| | |||
[[Image:Raptor-Eval.jpg|150px|link=http://www.neweagle.net/support/wiki/ProductDocumentation/Raptor/Raptor-Training/RaptorTraining_EvaluationForm.pdf]] | |||
|} | |||
==Sample Models/Demo Kits== | |||
This section contains the source software for any Demo Kit offered by New Eagle. This includes the source Simulink model and wiring diagrams, along with the appropriate Raptor packages, displays and calibrations. The demo kits are recommended to test out the Raptor Toolchain briefly yet effectively. For a more in-depth look, see the training kit options above. | |||
{| class="wikitable" style="text-align: center;" cellpadding = "5" | |||
!scope="col"| GCM 196 Project Files | |||
!scope="col"| GCM 70 Project Files | |||
!scope="col"| CM0711 Project Files | |||
!scope="col"| CM3620 Project Files | |||
|- | |||
|style = "height:150px"| | |||
[[Image:Raptorfile-GCM196.png|150px|link=http://www.neweagle.net/support/wiki/ProductDocumentation/Raptor/Raptor-Training/GCM196_ProjectFiles.zip]] | |||
|style = "height:150px"| | |||
[[Image:Raptorfile-GCM70.png|150px|link=http://www.neweagle.net/support/wiki/ProductDocumentation/Raptor/Raptor-Training/GCM70_ProjectFiles.zip]] | |||
|style = "height:150px"| | |||
[[Image:Raptorfile-0711.png|150px|link=http://www.neweagle.net/support/wiki/ProductDocumentation/Raptor/Raptor-Training/CM0711_ProjectFiles.zip]] | |||
|style = "height:150px"| | |||
[[Image:Raptorfile-3620.png|150px|link=http://www.neweagle.net/support/wiki/ProductDocumentation/Raptor/Raptor-Training/CM3620_ProjectFiles.zip]] | |||
|} | |||
{| class="wikitable" style="text-align: center;" cellpadding = "5" | |||
!scope="col"| GCM 48 Project Files | |||
!scope="col"| GCM 80 Project Files | |||
!scope="col"| VeeCAN 320 Project Files | |||
!scope="col"| VeeCAN 500 Project Files | |||
!scope="col"| VeeCAN 800 Project Files | |||
|- | |||
|style = "height:150px"| | |||
[[Image:Raptorfile_GCM48.png|150px|link=http://www.neweagle.net/support/wiki/ProductDocumentation/Raptor/Raptor-Training/GCM48_ProjectFiles.zip]] | |||
|style = "height:150px"| | |||
[[Image:Raptorfile_GCM80.png|150px|link=http://www.neweagle.net/support/wiki/ProductDocumentation/Raptor/Raptor-Training/GCM80_ProjectFiles.zip]] | |||
|style = "height:150px"| | |||
[[Image:Raptorfile-320.png|150px|link=http://www.neweagle.net/support/wiki/ProductDocumentation/Raptor/Raptor-Training/VeeCAN320_ProjectFiles_20.zip]] | |||
|style = "height:150px"| | |||
[[Image:Raptorfile_VC500.png|150px|link=http://www.neweagle.net/support/wiki/ProductDocumentation/Raptor/Raptor-Training/VeeCAN500_ProjectFiles.zip]] | |||
|style = "height:150px"| | |||
[[Image:Raptorfile-800.png|150px|link=http://www.neweagle.net/support/wiki/ProductDocumentation/Raptor/Raptor-Training/VeeCAN800_ProjectFiles.zip]] | |||
|} | |||
=Training Videos= | |||
==VeeCAN Tutorial== | |||
Check out the link below to watch a Raptor VeeCAN Tutorial to kickstart your display development. | |||
'''[https://www.youtube.com/watch?v=M-iM-7cFzSs New Eagle Raptor VeeCAN Tutorial]''' | |||
==Raptor Online Training == | |||
Below are all of the Raptor Training videos for this course. Each video builds off of the previous, so please follow them in chronological order. For optimal viewing experience, view the videos in 1080p. If need be, you can reduce the quality to 720p. Anything lower is not recommended. | |||
'''''Please note: The videos can be fast paced at times; be prepared to pause and work on small parts of the video at a time. An internet connection is required.''''' | |||
'''''Estimated internet usage: 5+ GBs.''''' | |||
{| class="wikitable" style="text-align: center;" cellpadding = "5" | |||
!scope="col" style = "width:75px;"|Number | |||
!scope="col" style = "width:350px;"|Video Topic | |||
!scope="col" style = "width:150px;"|Video Link | |||
|- | |||
|1 | |||
|Overview | |||
|style = "width:180px;" rowspan="20"| | |||
''' Click here for the <br>[https://neweagle.net/raptor-training-videos/ Video Playlist]''' | |||
Use password "birdsofprey" to access videos. | |||
|- | |||
|2 | |||
|Getting Started | |||
|- | |||
|3 | |||
|Introduction to MATLAB | |||
|- | |||
|4 | |||
|Raptor Library Introduction | |||
|- | |||
|5 | |||
|Starting a Raptor Project | |||
|- | |||
|6 | |||
|Raptor Trigger Blocks | |||
|- | |||
|7 | |||
|Raptor Adjustments, Measurements and Overrides | |||
|- | |||
|8 | |||
|First Build | |||
|- | |||
|9 | |||
|Hardware Kit Set Up | |||
|- | |||
|10 | |||
|Raptor-Cal Introduction | |||
|- | |||
|11 | |||
|Potentiometer Characterization | |||
|- | |||
|12 | |||
|Actuator Control | |||
|- | |||
|13 | |||
|Fault Management | |||
|- | |||
|14 | |||
|ETC Control System | |||
|- | |||
|15 | |||
|Data Storage Introduction | |||
|- | |||
|16 | |||
|Data Storage Project | |||
|- | |||
|17 | |||
|Introduction to CAN | |||
|- | |||
|18 | |||
|CAN Development | |||
|- | |||
|19 | |||
|Raptor-CAN | |||
|- | |||
|20 | |||
|Raptor Training Wrap Up Video | |||
|} | |||
'''Experiencing difficulties? Contact our [mailto:support@neweagle.net Support Team]''' | |||
'''Video Copyrights:'''<br> | |||
"Inspired", "Life of Riley", "Poofy Reel", "Pure Attitude" <br> | |||
Kevin MacLeod (incompetech.com) <br> | |||
Licensed under Creative Commons: By Attribution 3.0 <br> | |||
[http://creativecommons.org/licenses/by/3.0/ Creative Commons 3.0 License] <br> | |||
© New Eagle 2018 | |||
Latest revision as of 20:33, 11 May 2023
New Eagle > Products Wiki > Raptor Platform > Raptor-Training
 Raptor Training, created by our team of experienced controls engineers, provides hands-on experience which enables the new practitioner to gain familiarity with the toolchain by building, deploying, calibrating and refining a real-world control application.
Training OverviewWho should attend?
What is covered? Why should I attend? Where is it held?
When is it?
Training CurriculumThe Raptor Training course is designed to give an understanding of the Raptor Platform in an efficient, hands-on manner. We will start off in the MATLAB/Simulink environment, showing concepts of Raptor-Dev's integration and how to use model-based design to your advantage. Once the project is built, we will flash the compiled code onto the module. Using Raptor-Cal, New Eagle's calibration tool, we will calibrate and test the system. The topics covered in Raptor Training are listed below.
Getting Started
MATLAB/Simulink Introduction
Raptor-Dev
Raptor-Cal
Raptor Hardware
Training PrerequisitesThe following steps should be completed before the Raptor Training course. Special TopicsFor on-site training: If you would like Raptor Training to cover any specific topics, please contact sales at least two weeks prior to training so we can include additional information and examples. Software RequirementsFollow the instructions below for necessary software installations. More details can be found in the Raptor Getting Started Guide. Operating SystemWindows 7 or later is required. MATLAB and SimulinkPlease Note: MATLAB and Simulink are used throughout training and having a basic understanding of these tools is a necessary requirement for training. To learn more about MATLAB and Simulink: See the Raptor Training videos for more tutorials. MATLAB 2017b or later is recommended. The following tools from MathWorks are required:
If you don't have all these MathWorks products, we can help procure a temporary MathWorks trial license for you during your training classes. If you would like one, please follow these instructions:
Raptor-Dev and Raptor-CalRaptor-Dev and Raptor-Cal can be downloaded from software.neweagle.net. If necessary, first create an account and wait for the confirmation email (requests may take up to two business days to fulfill). Ensure compatibility between Raptor-Dev and MATLAB using the matrix below.
After installation of Raptor-Dev, the Raptor Configuration Editor will open (alternatively, open it by navigating to Start > Programs > New Eagle > Raptor Configuration Editor). Use this tool to assign Raptor-Dev to the version of MATLAB used for training. Once Raptor-Dev and Raptor-Cal are installed, navigate to the New Eagle License Viewer (Start > Programs > New Eagle > New Eagle License Viewer). If necessary, request a trial license by following the instructions below.
CompilersThe appropriate compiler and associated license will be required.
Kvaser CANKingKvaser CANKing is a free, basic CAN bus monitor. To download, go to the Kvaser downloads page here. Click on the link to download Kvaser CANKing, and proceed through the installation. Kvaser Database EditorKvaser offers a DBC file creator/editor which can be downloaded here: Kvaser DBC Editor Download This is required for Video 17. Training DownloadsTraining KitThis section is for all documentation you may need for Raptor Training. The Raptor Training Kit is designed to allow the user to configure hardware, develop software and create calibrations all within the scope of the Raptor Toolchain.
Sample Models/Demo KitsThis section contains the source software for any Demo Kit offered by New Eagle. This includes the source Simulink model and wiring diagrams, along with the appropriate Raptor packages, displays and calibrations. The demo kits are recommended to test out the Raptor Toolchain briefly yet effectively. For a more in-depth look, see the training kit options above.
Training VideosVeeCAN TutorialCheck out the link below to watch a Raptor VeeCAN Tutorial to kickstart your display development. New Eagle Raptor VeeCAN Tutorial Raptor Online TrainingBelow are all of the Raptor Training videos for this course. Each video builds off of the previous, so please follow them in chronological order. For optimal viewing experience, view the videos in 1080p. If need be, you can reduce the quality to 720p. Anything lower is not recommended. Please note: The videos can be fast paced at times; be prepared to pause and work on small parts of the video at a time. An internet connection is required. Estimated internet usage: 5+ GBs.
Experiencing difficulties? Contact our Support Team Video Copyrights: © New Eagle 2018 |