Raptor VeeCAN: Difference between revisions
Ssienkowski (talk | contribs) (Created page with 'Return to the main Raptor page ==Overview== <p>The Raptor VeeCAN platform (RVC) is a Simulink toolset for development of the VeeCAN 320 Display. RVC is architecte…') |
|||
| (38 intermediate revisions by 6 users not shown) | |||
| Line 1: | Line 1: | ||
{{DISPLAYTITLE: Raptor VeeCAN}} | |||
{{Navigation}} '''Raptor VeeCAN''' | |||
==Overview== | ==Overview== | ||
New Eagle’s line of '''[[Displays#Raptor_Displays|Raptor Displays]]''' and complimentary '''[[Raptor-Dev|Raptor-Dev]]''' software offer an alternative approach to the traditional programming languages: These displays allow developers to leverage the graphical programming environment of MATLAB Simulink to quickly and easily create, edit and debug display software. All Raptor displays are capable of interfacing with any CAN-based actuators or sensors. The Raptor VeeCAN 800 and VeeCAN 320, in particular, have a number of analog and frequency inputs and digital outputs, making these displays ideal all-in-one display/controller solutions for a wide variety of applications. | |||
'''[http://www.neweagle.net/support/wiki/images/e/e5/RaptorVeeCAN_Overview.pdf PDF Raptor VeeCAN Overview]''' | |||
'''[[Raptor_Platform| Raptor Platform Information]]''' | |||
To view a full list of the Raptor VeeCAN displays, click '''[[Displays#Raptor_Displays|here]]'''. | |||
==VeeCAN Libraries== | ==VeeCAN Libraries== | ||
For information on the blockset libraries that support VeeCAN, [[Raptor | For information on the blockset libraries that support VeeCAN, '''[[Raptor-Dev-Display-Libraries|click here]]'''. | ||
== | <gallery widths=400px heights=250px perrow=2 caption="Custom Raptor Libraries"> | ||
File:FaultScreen.png|Example of a custom library block on the outside | |||
File:APG fault.png|An example of what you can do with a custom library | |||
</gallery> | |||
Custom libraries are a useful tool in the Raptor Platform, because not only can custom, prefabricated libraries be imported, user-made ones are also possible. | |||
==CAN Development== | ==CAN Development== | ||
<p>CAN development within the Raptor framework integrates industry-standard DBC files. This allows for quick sharing of a CAN protocol both within and outside the Raptor framework. The image below shows the configuration screen of a CAN Rx message block after a DBC file is selected.</p> | <p>CAN development within the Raptor framework integrates industry-standard DBC files. This allows for quick sharing of a CAN protocol both within and outside the Raptor framework. The image below shows the configuration screen of a CAN Rx message block after a DBC file is selected.</p> | ||
<!--Edit perrow value as you add images.--> | |||
<gallery widths=500px heights=300px perrow=1 caption="Raptor CAN GUI"> | |||
File:RaptorGUI.png|Configuration of a CAN receive block with a loaded DBC file | |||
</gallery> | |||
<p>Selection of a CAN automatically populates signal output specifications on the Raptor CAN message blocks with the information contained in the DBC file, as shown in the image below.</p> | <p>Selection of a CAN automatically populates signal output specifications on the Raptor CAN message blocks with the information contained in the DBC file, as shown in the image below.</p> | ||
<gallery widths=500px heights=300px perrow=1 caption="Raptor CAN Block"> | |||
File:CANmessgae.png|View of a CAN receive block after selection of a CAN message from a DBC file | |||
</gallery> | |||
==Raptor VeeCAN Example== | ==Raptor VeeCAN Example== | ||
<p>The image below is | <p>The image below is a basic Raptor VeeCAN project. It demonstrates separation of HMI logic from the control and signal logic. This is a stylistic approach to ensure easy transferability of logic to and from other Raptor platforms that do not have HMI functionality.</p> | ||
<!--Edit perrow value when adding pictures--> | |||
<gallery widths=700px heights=300px perrow=1 caption="Raptor Display Project"> | |||
File:ExamplePROJECT.png|Example design, separation of HMI and controls logic is visible | |||
</gallery> | |||
Learn more about our Raptor Platform '''[[Raptor_Platform|here]]'''. | |||
View example Raptor displays '''[[Raptor_Display_Examples#Raptor_Display_Examples|here]]'''. | |||
==VeeCAN Display Development== | ==VeeCAN Display Development== | ||
<p>The Raptor HMI blocks were designed both to allow ease of use and to allow low-level control of display features. In the RVC library you will find high level blocks to quickly display an assortment of information and graphics, such as: lists, menus, gauges, images | <p>The Raptor HMI blocks were designed both to allow ease of use and to allow low-level control of display features. In the RVC library you will find high level blocks to quickly display an assortment of information and graphics, such as: lists, menus, gauges, images and text strings. These high-level blocks have been designed from a primitive block set, meaning that tweaks can be made to these under-the-covers primitives to configure the display to your taste or to help you create your own display screens from scratch. The images below demonstrate a gauge block and a subset of the primitive blocks within it.</p> | ||
<gallery widths=300px heights=250px perrow=2 caption="Raptor Display Blocks"> | |||
File:Quadscreen.png|Gauge blocks consisting of primitives | |||
File:INgauge.png|Primitive blocks within a gauge block | |||
</gallery> | |||
==Simulation== | ==Simulation== | ||
<p>The | <p>The Raptor VeeCAN simulator creates a strong link from the software development cycle to the hardware testing cycle. Typically, these would be two distinct, time-consuming phases, but, with strong coupling of the simulator and the hardware (hardware-in-the-loop simulation) and with real-time debugging, iteration time is drastically reduced. '''[[Raptor_Display_Examples| Click here]]''' to view and test some Raptor Simulators.</p> | ||
<gallery widths=222px heights=222px perrow=3> | |||
Image:re22.png|New Eagle Splash Screen | |||
Image:re17.png|Example of a custom information screen on a VeeCAN simulator | |||
Image:re14.png|A simulated VeeCAN system tuning menu | |||
</gallery> | |||
Latest revision as of 14:12, 2 March 2023
New Eagle > Products Wiki > Raptor VeeCAN
Overview
New Eagle’s line of Raptor Displays and complimentary Raptor-Dev software offer an alternative approach to the traditional programming languages: These displays allow developers to leverage the graphical programming environment of MATLAB Simulink to quickly and easily create, edit and debug display software. All Raptor displays are capable of interfacing with any CAN-based actuators or sensors. The Raptor VeeCAN 800 and VeeCAN 320, in particular, have a number of analog and frequency inputs and digital outputs, making these displays ideal all-in-one display/controller solutions for a wide variety of applications.
To view a full list of the Raptor VeeCAN displays, click here.
VeeCAN Libraries
For information on the blockset libraries that support VeeCAN, click here.
- Custom Raptor Libraries
-
Example of a custom library block on the outside
-

An example of what you can do with a custom library


Custom libraries are a useful tool in the Raptor Platform, because not only can custom, prefabricated libraries be imported, user-made ones are also possible.
CAN Development
CAN development within the Raptor framework integrates industry-standard DBC files. This allows for quick sharing of a CAN protocol both within and outside the Raptor framework. The image below shows the configuration screen of a CAN Rx message block after a DBC file is selected.
- Raptor CAN GUI
-
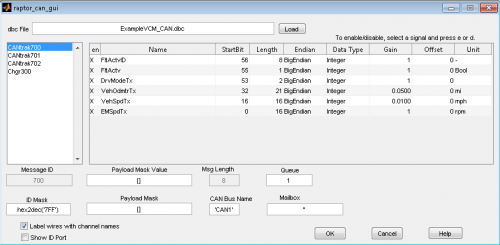
Configuration of a CAN receive block with a loaded DBC file

Selection of a CAN automatically populates signal output specifications on the Raptor CAN message blocks with the information contained in the DBC file, as shown in the image below.
- Raptor CAN Block
-
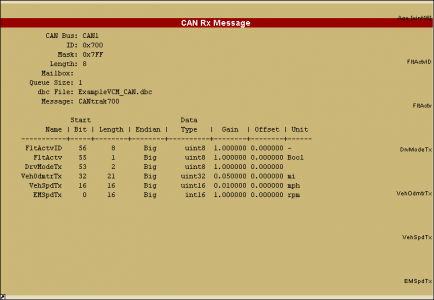
View of a CAN receive block after selection of a CAN message from a DBC file

Raptor VeeCAN Example
The image below is a basic Raptor VeeCAN project. It demonstrates separation of HMI logic from the control and signal logic. This is a stylistic approach to ensure easy transferability of logic to and from other Raptor platforms that do not have HMI functionality.
- Raptor Display Project
-
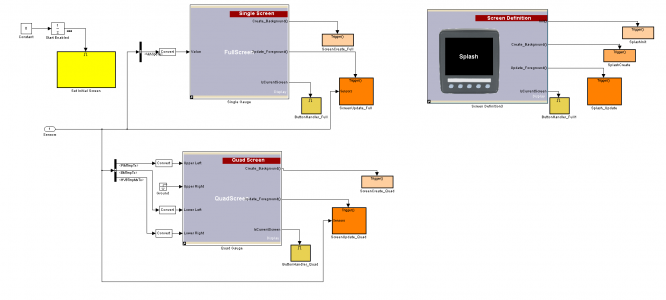
Example design, separation of HMI and controls logic is visible

Learn more about our Raptor Platform here.
View example Raptor displays here.
VeeCAN Display Development
The Raptor HMI blocks were designed both to allow ease of use and to allow low-level control of display features. In the RVC library you will find high level blocks to quickly display an assortment of information and graphics, such as: lists, menus, gauges, images and text strings. These high-level blocks have been designed from a primitive block set, meaning that tweaks can be made to these under-the-covers primitives to configure the display to your taste or to help you create your own display screens from scratch. The images below demonstrate a gauge block and a subset of the primitive blocks within it.
- Raptor Display Blocks
-
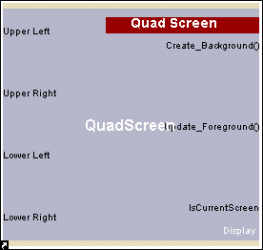
Gauge blocks consisting of primitives
-
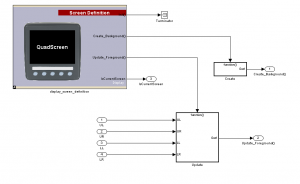
Primitive blocks within a gauge block


Simulation
The Raptor VeeCAN simulator creates a strong link from the software development cycle to the hardware testing cycle. Typically, these would be two distinct, time-consuming phases, but, with strong coupling of the simulator and the hardware (hardware-in-the-loop simulation) and with real-time debugging, iteration time is drastically reduced. Click here to view and test some Raptor Simulators.
-

New Eagle Splash Screen
-
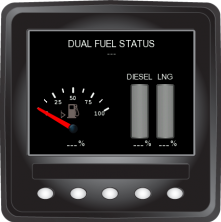
Example of a custom information screen on a VeeCAN simulator
-
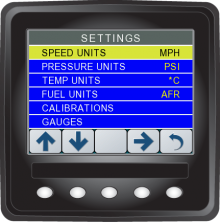
A simulated VeeCAN system tuning menu


