MotoHawk-FAQ: Difference between revisions
| (66 intermediate revisions by 3 users not shown) | |||
| Line 17: | Line 17: | ||
===Side-by-Side Installer=== | ===Side-by-Side Installer=== | ||
Older versions of MotoHawk only allowed one version of MotoHawk to be installed at any given time. The MotoHawk Side-by-Side | Older versions of MotoHawk only allowed one version of MotoHawk to be installed at any given time. The MotoHawk Side-by-Side Installer, new with MotoHawk2010a, allows for many versions of MotoHawk to be installed at one time along with one legacy MotoHawk (MotoHawk2009bSP0 or earlier). Take, as an example, having one project in the final stages of development or already in production using MotoHawk 2009a and starting a new project and wanting to use the newest software. The Side-by-Side Installer allows you to have the two working environments installed at the same time and switch between them easily. To allow this easy change, the Side-by-Side Installer includes a MotoHawk Version Selector which allows you to select which version of MotoHawk will run with a specific version of MATLAB. | ||
===Changes to Installation and Use Procedures=== | ===Changes to Installation and Use Procedures=== | ||
| Line 38: | Line 38: | ||
===Using MotoHawk Version Selector=== | ===Using MotoHawk Version Selector=== | ||
[[Image:Side_by_Side2.JPG|right]] | [[Image:Side_by_Side2.JPG|right]] | ||
The Side-by-Side | The Side-by-Side Installer also installs the MotoHawk Version Selector tool. To get to this program, go to Start -> All Programs -> Woodward -> MCS -> MotoHawk -> MotoHawk Version Selector. After you have selected the MATLAB and MotoHawk versions, launching the selected versions of MATLAB will launch MotoHawk. | ||
====Select MATLAB Version==== | ====Select MATLAB Version==== | ||
The top has a dropdown list titled "MATLAB Version." This dropdown will list all versions of MATLAB on the machine. Select the version of MATLAB for which you want to change the MotoHawk | The top has a dropdown list titled "MATLAB Version." This dropdown will list all versions of MATLAB on the machine. Select the version of MATLAB for which you want to change the MotoHawk version or select the checkbox below labeled "Use same MotoHawk Toolbox for all MATLAB versions." Note that not all MotoHawk versions will support all MATLAB versions, so the Side-by-Side installs may be grayed out if the checkbox is used. | ||
====Disabled==== | ====Disabled==== | ||
This radio button selection will allow MATLAB to launch without initializing any version of MotoHawk. It is also the default choice on MATLAB versions the most recent installer supports. | This radio button selection will allow MATLAB to launch without initializing any version of MotoHawk. It is also the default choice on MATLAB versions the most recent installer supports. | ||
====Side-by-Side Installation==== | ====Side-by-Side Installation==== | ||
All of the Side-by-Side installations will be listed in radio buttons in the Select MotoHawk Toolbox Version panel. Select the radio button next to the version you want to use and it will integrate into the selected version of MATLAB. | All of the Side-by-Side installations will be listed in radio buttons in the Select MotoHawk Toolbox Version panel. Select the radio button next to the version you want to use, and it will integrate into the selected version of MATLAB. | ||
====Using Environment Variable MOTOHAWK_DIR==== | ====Using Environment Variable MOTOHAWK_DIR==== | ||
| Line 52: | Line 52: | ||
:Windows XP | :Windows XP | ||
#Right click on " | #Right click on "My Computer" and select properties | ||
#Select the advanced tab | #Select the advanced tab | ||
#Click the Environment Variables button at the bottom of the page | #Click the Environment Variables button at the bottom of the page | ||
| Line 59: | Line 59: | ||
<br> | <br> | ||
:Windows Vista/Windows 7 | :Windows Vista/Windows 7 | ||
#Right click on " | #Right click on "My Computer" and select properties | ||
#Select the Advanced System settings on the left side of the window | #Select the Advanced System settings on the left side of the window | ||
#Click the Environment Variables button at bottom of page | #Click the Environment Variables button at bottom of page | ||
| Line 69: | Line 69: | ||
==Starting a New Project == | ==Starting a New Project == | ||
Use the command in the | Use the command in the MATLAB window '''>>motohawk_project('insert_name_here')''' to create a new project called "insert_name_here". | ||
== MotoHawk Blockset == | == MotoHawk Blockset == | ||
| Line 206: | Line 206: | ||
===How do I check the build version of a model?=== | ===How do I check the build version of a model?=== | ||
At the MATLAB command prompt, type in motohawk_build_version('modelname') and it will return a | At the MATLAB command prompt, type in motohawk_build_version('modelname') and it will return a three-digit number which indicates the build version of that model. | ||
===How do I reset the motohawk_build_version counter?=== | ===How do I reset the motohawk_build_version counter?=== | ||
| Line 218: | Line 218: | ||
==Using S Functions With MotoHawk== | ==Using S Functions With MotoHawk== | ||
S functions are a useful tool to make custom blocks. They can also be used to protect your code from an end user. S functions can be written using .m files, C code or Fortran, with C code being the most common way. S functions require practice and knowledge of C, masking blocks (including how masks can handle some of the I/O), TLC and embedded C. That information can be acquired by reading the Simulink help. To help you make S functions work with MotoHawk, here is an example model and document to explain how to use it: [ | S functions are a useful tool to make custom blocks. They can also be used to protect your code from an end user. S functions can be written using .m files, C code or Fortran, with C code being the most common way. S functions require practice and knowledge of C, masking blocks (including how masks can handle some of the I/O), TLC and embedded C. That information can be acquired by reading the Simulink help. To help you make S functions work with MotoHawk, here is an example model and document to explain how to use it: [https://wiki.neweagle.net/ProductDocumentation/MotoTron/MotoHawk/Track_2B_Basic_S-Functions_and_TLC.zip Help With S Functions] | ||
Only inlined S functions as described in the presentation provided can be used with MotoHawk. If you wanted to use a non-inlined S function to protect IP, it is recommended that you use a component model, as component models have the ability to protect IP. Note: While it is possible to embed S functions into a MotoHawk model as the presentation shows, this is not, in general, supported or recommended by Woodward. The intent of MotoHawk is to allow the user to design in a model-based design environment. By using MotoHawk as a framework for embedding c-code, you are losing the power of the tool and of model-based design. We would recommend that S functions are considered only to implement small chunks of code that aren’t easily described in Simulink or Stateflow. | Only inlined S functions as described in the presentation provided can be used with MotoHawk. If you wanted to use a non-inlined S function to protect IP, it is recommended that you use a component model, as component models have the ability to protect IP. Note: While it is possible to embed S functions into a MotoHawk model as the presentation shows, this is not, in general, supported or recommended by Woodward. The intent of MotoHawk is to allow the user to design in a model-based design environment. By using MotoHawk as a framework for embedding c-code, you are losing the power of the tool and of model-based design. We would recommend that S functions are considered only to implement small chunks of code that aren’t easily described in Simulink or Stateflow. | ||
| Line 246: | Line 246: | ||
* '''MotoHawk''' and '''MotoTron Licensing Viewer''' crash | * '''MotoHawk''' and '''MotoTron Licensing Viewer''' crash | ||
** Please install the'''[[MotoHawk#Download|newest release]]''' of MotoHawk. | ** Please install the '''[[MotoHawk#Download|newest release]]''' of MotoHawk. | ||
** This will install any newly released fixes for MotoHawk. | ** This will install any newly released fixes for MotoHawk. | ||
** After installing the newest release, use your regular MotoHawk version as normal. | ** After installing the newest release, use your regular MotoHawk version as normal. | ||
* All '''Moto''' software is crashing, i.e., '''MotoHawk''', '''MotoTune''' etc. | * All '''Moto''' software is crashing, i.e., '''MotoHawk''', '''MotoTune''' etc. | ||
** A full re-installation of the '''Moto | ** A full re-installation of the '''Moto''' suite may be required. | ||
** Please follow '''[[MotoTune-FAQ#Installation_Procedure|these steps]]''' for proper installation. | ** Please follow '''[[MotoTune-FAQ#Installation_Procedure|these steps]]''' for proper installation. | ||
| Line 261: | Line 261: | ||
===Build Errors=== | ===Build Errors=== | ||
If you get | If you get the error message: '''Error using ==> motocoder_codegen at 78''' and/or '''Error using ==> motohawk_make_rtw at 355 MotoCoder Build Failed''', you probably have a path error. This error also throws up a warning in the build file that it is looking for a file and cannot find it. To fix this, make sure the path is correct. The MATLAB path is seen in the current folder window, located in the MATLAB command window. You want to make sure you are located in the folder that your model is in. You also want to make sure you get to this folder by clicking on and entering the folder, not just using the expand arrows until you can see it. Using the path is made easier by using the '''>>motohawk_project''' command which makes a new model with folders for libraries, CAN messaging, and .m files. There is a setup and close .m file which then handles the path management during builds. This manages the path without the need for manually adding files to the path. Also make sure you never manually add the build folder to the path; this can cause build errors. The path to the model cannot contain spaces. An example of a valid path to a model would be '''C:\DEV_AREA\test_lib'''. These errors will not normally be caught by compiling with Ctrl-D but will appear upon building the model. | ||
====Warning: OSS_VR_Input has an unsupported VR Interface selected in the design==== | ====Warning: OSS_VR_Input has an unsupported VR Interface selected in the design==== | ||
In previous versions of MotoHawk a build warning might appear when a '''[[Advanced Digital I/O Blocks#MotoHawk:Blocks:Frequency In|frequency in]]''' block with CNK pin and a VR interface is selected. This message is incorrect and should be ignored. This warning was removed in MotoHawk 2012a Beta 4. | In previous versions of MotoHawk, a build warning might appear when a '''[[Advanced Digital I/O Blocks#MotoHawk:Blocks:Frequency In|frequency in]]''' block with a CNK pin and a VR interface is selected. This message is incorrect and should be ignored. This warning was removed in MotoHawk 2012a Beta 4. | ||
====Warning: Calibratable I/O for PWMOutput NOT supported in MotoCoder yet==== | ====Warning: Calibratable I/O for PWMOutput NOT supported in MotoCoder yet==== | ||
When building a model for an ECM-OH, ECM-5554-112-0902/0904, or any of the S12 modules a build warning may occur due to the "allow I/O pin to be calibrated option from MotoTune | When building a model for an ECM-OH, ECM-5554-112-0902/0904, or any of the S12 modules, a build warning may occur due to the "allow I/O pin to be calibrated" option from MotoTune being selected. In this instance, the build may complete but cause errors. Deselecting the option may solve the error. The warning stems from the fact that none of the mentioned controllers support the Calibratable IO function. The option to "allow I/O pin to be calibrated" has been removed from the block mask when these modules are selected in MotoHawk 2012b Beta 2 and higher. | ||
===Programming Error: Code:(4,4,6,-1) ECU refused connection due to incorrect token security=== | ===Programming Error: Code:(4,4,6,-1) ECU refused connection due to incorrect token security=== | ||
[[Image:MotoTuneErrorCodeIncorrectTokenSecurity.png]] | [[Image:MotoTuneErrorCodeIncorrectTokenSecurity.png]] | ||
This error may occur when you try to program | This error may occur when you try to program an *.srz file that was built with a newer version of MotoHawk. Upgrading to a newer version of MotoTune and MotoServer may solve the problem. | ||
==Target Definition Block== | ==Target Definition Block== | ||
| Line 280: | Line 280: | ||
=== ECM5554-112 Target Definition=== | === ECM5554-112 Target Definition=== | ||
MotoHawk Target Definition Block target names to use: | MotoHawk Target Definition Block target names to use: | ||
:Use these targets for ECM-5554-112-0902-F00 ("PROD") and ECM-5554-112-0902-CP0 ("DEV") modules: | |||
::* ECM-5554-112-0902-kD: PCM0902 module with knock development interface, DV release hardware | ::* ECM-5554-112-0902-kD: PCM0902 module with knock development interface, DV release hardware | ||
::* ECM-5554-112-0902-kP: PCM0902 module with knock development interface, PV release hardware | ::* ECM-5554-112-0902-kP: PCM0902 module with knock development interface, PV release hardware | ||
::* ECM-5554-112-0902-xD: PCM0902 module, DV release hardware | ::* ECM-5554-112-0902-xD: PCM0902 module, DV release hardware | ||
::* ECM-5554-112-0902-xP: PCM0902 module, PV release hardware | ::* ECM-5554-112-0902-xP: PCM0902 module, PV release hardware | ||
Use this target for ECM-5554-112- | :Use this target for ECM-5554-112-0904-F00 ("PROD") and ECM-5554-112-0904-CP0 ("DEV") modules: | ||
::* ECM-5554-112-0904-xD: PCM0904 module, DV and PV release hardware | ::* ECM-5554-112-0904-xD: PCM0904 module, DV and PV release hardware | ||
Note: If you cannot find the module in the target list, make sure you have your licensing dongle plugged in. This will unlock all of the modules to build to. | Note: If you cannot find the module in the target list, make sure you have your licensing dongle plugged in. This will unlock all of the modules to build to. | ||
| Line 293: | Line 293: | ||
==Software== | ==Software== | ||
=== | ===[http://www.mathworks.com/?s_eid=partnerNEWEAGLE| MathWorks]=== | ||
'''Recommended installations:''' | '''Recommended installations:''' | ||
| Line 310: | Line 310: | ||
::*With MotoHawk 2011aBeta1 and later, MotoServer/MotoTune 8.13.7.141 or later is required | ::*With MotoHawk 2011aBeta1 and later, MotoServer/MotoTune 8.13.7.141 or later is required | ||
::*With MotoHawk 2010aBeta6 and later, MotoServer/MotoTune 8.13.7.120 or later is required | ::*With MotoHawk 2010aBeta6 and later, MotoServer/MotoTune 8.13.7.120 or later is required | ||
::*With MotoHawk 2009bBeta1 and later, MotoServer/MotoTune 8.13.7. | ::*With MotoHawk 2009bBeta1 and later, MotoServer/MotoTune 8.13.7.087 or later is required | ||
===GCC Compiler=== | |||
::'''[[MotoHawk-Compilers#GCC_Compiler|GCC Compiler]]''' | |||
::*No license required | ::*No license required | ||
::*MotoHawk 2009bBeta2 or later is required | ::*MotoHawk 2009bBeta2 or later is required | ||
::*GCC 4. | ::*GCC 4.6 is used with MotoHawk 2011b and on | ||
::*GCC 4. | ::*GCC 4.4 is used with MotoHawk 2009b to 2011a and is not supported on 64-bit MATLAB installations | ||
::*GCC compilers work with 64 bit MATLAB for PowerPC targets. This includes the 40, 80, 112 | ::*GCC compilers work with 64-bit MATLAB for PowerPC targets. This includes the 40-, 80-, 112- and 128-pin modules. | ||
===CANKing=== | ===CANKing=== | ||
| Line 326: | Line 325: | ||
===Latest Version of MotoHawk=== | ===Latest Version of MotoHawk=== | ||
The latest MotoHawk version is always available from [[Required Files]]. You must have an account on the New Eagle Wiki in order to download it. | The latest MotoHawk version is always available from '''[[Required Files]]'''. You must have an account on the New Eagle Wiki in order to download it. | ||
=== Does Motohawk run on | === Does Motohawk run on 64-bit software? === | ||
:*If the | :*If the operating system is 64-bit, then MotoHawk 2010a SP0 or later is required. | ||
:*If the MATLAB installation is 64-bit, then MotoHawk 2010b SP0 or later is required. | :*If the MATLAB installation is 64-bit, then MotoHawk 2010b SP0 or later is required. | ||
Some customers are using MotoHawk and MotoTune on Windows Vista 64-bit with MATLAB 32-bit. They report: | Some customers are using MotoHawk and MotoTune on Windows Vista 64-bit with MATLAB 32-bit. They report: | ||
-------------------------------------- | |||
After installing MotoServerRuntime, MotoTune, and MotoHawk (using right-click install-as-administrator), copy the entire directory tree "C:\Program Files (x86)\MotoTron\..." to "C:\Program Files\MotoTron\..." (substitute "Woodward" for "MotoTron" for MotoHawk 2009b and later releases). When it is time to uninstall, remember to delete the "C:\Program Files\MotoTron\..." copy before uninstalling with Add/Remove Programs. | |||
----------------------------------------------------- | |||
=== What are some known problems with running Motohawk on Windows Vista? === | === What are some known problems with running Motohawk on Windows Vista? === | ||
| Line 343: | Line 343: | ||
====Error 1925 (insufficient privileges)==== | ====Error 1925 (insufficient privileges)==== | ||
This error occurs when the install process is not run as Administrator. In | This error occurs when the install process is not run as Administrator. In your web browser, right click on MotoHawk_[Version] and select 'Run as Administrator' rather than 'Open' or double-clicking. | ||
===MotoHawk Compatibility Matrix=== | ===MotoHawk Compatibility Matrix=== | ||
| Line 353: | Line 353: | ||
=== Known Problems with Mathworks Software=== | === Known Problems with Mathworks Software=== | ||
There is a known MATLAB R2013b issue regarding how MATLAB handles info.xml files at startup. As a workaround to this issue, please unzip | There is a known MATLAB R2013b issue regarding how MATLAB handles info.xml files at startup. As a workaround to this issue, please unzip this '''[http://www.neweagle.net/support/wiki/downloads/r2013b_patch.zip patch]''' in the MATLAB root directory; the root directory is the directory given as the output of the '''MATLABROOT''' command. Alternatively, you can delete any info.xml files in any directories on your path. | ||
=== MotoHawk and Windows 8 Compatibility=== | === MotoHawk and Windows 8 Compatibility=== | ||
| Line 365: | Line 365: | ||
MotoHawk is compatible with Windows 10 starting with MotoHawk 2015b. | MotoHawk is compatible with Windows 10 starting with MotoHawk 2015b. | ||
Known Issue | '''Known Issue''' | ||
The MotoHawk installer will have an issue supporting multiple versions of MotoHawk on machines which do not previously have .NET 2.0 installed. If multiple versions of MotoHawk are intended, it is recommended to ensure .NET 3.0 SP1 (includes .NET 2.0) is installed before installing the first MotoHawk version. | The MotoHawk installer will have an issue supporting multiple versions of MotoHawk on machines which do not previously have .NET 2.0 installed. If multiple versions of MotoHawk are intended, it is recommended to ensure .NET 3.0 SP1 (includes .NET 2.0) is installed before installing the first MotoHawk version. | ||
<!-- | |||
=== MotoHawk Dongle and USB 3.0 Compatibility === | === MotoHawk Dongle and USB 3.0 Compatibility === | ||
| Line 374: | Line 375: | ||
However, independent from updates from Intel we are currently testing a new driver version for the CRYPTO-BOX with a workaround for this USB 3.0 problem. | However, independent from updates from Intel we are currently testing a new driver version for the CRYPTO-BOX with a workaround for this USB 3.0 problem. | ||
If you want to test this driver, please download it | If you want to test this driver, please download it '''[www.marx.com/ftp/temp/USB3/CBU_Test_Drv_21Jan2013.zip here]'''. | ||
www.marx.com/ftp/temp/USB3/CBU_Test_Drv_21Jan2013.zip | |||
IMPORTANT: | '''IMPORTANT:'''<br> | ||
The driver should work fine | The driver should work fine but is not yet digitally signed! To install it under Windows 7 64-bit versions, you have to restart the computer and hit the F8 key multiple times before Windows starts. Then choose "Disable Driver Signature Enforcement". This has to be done each time Windows starts when using this driver. We will offer a WHQL certified version of the driver as soon as we have finished testing and passed certification procedure. Make sure that you have plugged in the CRYPTO-BOX. Unzip the driver package. Open the Device Manager, right-click on the "CBUSB ver 2.0" device and choose '''Update Driver Software''' -> '''Browse my computer for driver software''' -> '''Let me pick from a list of device drivers on my computer''' -> '''Have Disk'''. Now select the corresponding 32- or 64-bit .INF file from the driver package and click "OK". If Windows says that the driver is not signed, choose that you want to install the driver anyway. | ||
key multiple times before Windows starts. Then choose "Disable Driver Signature Enforcement". This has to be done each time Windows starts when using this driver. We will offer a WHQL certified version of the driver as soon as we have finished testing and passed certification procedure. | |||
Make sure that you have plugged in the CRYPTO-BOX. Unzip the driver package. Open the Device Manager, right-click on the "CBUSB ver 2.0" device and choose | |||
==== Another USB 3.0 Workaround ==== | |||
==== Another USB 3.0 | Turn off the xHCI mode in your computer's BIOS settings. Because of this, the super-speed of the USB 3.0 interface will throttle down to high-speed (USB 2.0). It ran perfectly in tests. Most motherboards allow you to disable the xHCI mode in the BIOS selectively to individual USB 3.0 ports, so you can still use the other ports at full speed. | ||
Turn off the xHCI mode in your | --> | ||
=== Can I speed up the build on the ECM5554-112? === | === Can I speed up the build on the ECM5554-112? === | ||
| Line 393: | Line 391: | ||
{| border=1 | {| border=1 | ||
!Module / Family | !Module/Family | ||
!Green Hills Compiler 3.6 | !Green Hills Compiler 3.6 | ||
!Green Hills Compiler 4.2.1 | !Green Hills Compiler 4.2.1 | ||
| Line 506: | Line 504: | ||
==== December 2010 compiler update from Woodward ==== | ==== December 2010 compiler update from Woodward ==== | ||
The GNU compiler is not supported for the S12 target modules. The cost of the CodeWarrior compiler only (basic) is fairly inexpensive compared to our effort to support the GNU toolchain for S12. Additionally, when we last looked into this the XGATE support was not available. | The GNU compiler is not supported for the S12 target modules. The cost of the CodeWarrior compiler only (basic) is fairly inexpensive compared to our effort to support the GNU toolchain for S12. Additionally, when we last looked into this, the XGATE support was not available. | ||
=== MPC5XX / MPC55XX Compiler Options === | === MPC5XX/MPC55XX Compiler Options === | ||
==== Greenhills ==== | ==== Greenhills ==== | ||
The Greenhills PowerPC compiler is recommended for production programs. | The Greenhills PowerPC compiler is recommended for production programs. GHS 3.6 and 4.2.1 is on both the 5xx and 55xx MotoHawk controllers. Information on this compiler can be found at '''[http://www.ghs.com/products/compiler.html Greenhills compiler]'''. | ||
Information on this compiler can be found at '''[http://www.ghs.com/products/compiler.html Greenhills compiler]'''. | |||
'''Greenhills Demo License''' | '''Greenhills Demo License''' | ||
Greenhills compilers can be demonstrated for 30 days by downloading the software. After installing, go to Start/Multi…./Licensing/License | Greenhills compilers can be demonstrated for 30 days by downloading the software. After installing, go to Start/Multi…./Licensing/License Request Generator. It automatically takes you to the Greenhills website and requests the license. Typical turnaround is 24 hrs. | ||
'''International GHS License''' | '''International GHS License''' | ||
All licenses sold outside the USA, including Canada, must be International Dongle type. | All licenses sold outside the USA, including Canada, must be International Dongle type. The Green Hills Compiler (GHS) is a compiler supported in MotoHawk for 5xx and 55xx processor targets. This is the recommended compiler. | ||
The Green Hills Compiler (GHS) is a compiler supported in MotoHawk for 5xx and 55xx processor targets. This is the | |||
===== Green Hills Compiler Installation ===== | ===== Green Hills Compiler Installation ===== | ||
To install the GHS application from a CD: | To install the GHS application from a CD: | ||
#Insert CD in drive. Click Start->Run and double | #Insert CD in drive. Click Start -> Run and double click on Setup.exe. <BR>Follow on-screen instructions. (Try to leave the default install directory.) <BR><BR> | ||
#If you do not already have a license launch the License Request Generator:<BR>In Windows, select | #If you do not already have a license, launch the License Request Generator:<BR>In Windows, select Start -> All Programs -> Multi2000, PowerPC v3.6 -> Licensing -> License Request Generator<BR>You may want to request an evaluation license initially. This will help get you started faster.<BR><BR> | ||
#If you have a license run the | #If you have a license, run the license installer:<BR>In Windows, select Start -> All Programs -> Multi2000, PowerPC v3.6 -> Licensing -> Install Licenses<BR><br> | ||
#Select your .key file and then install all the licenses. <BR> | #Select your *.key file and then install all the licenses. <BR> | ||
===== Using GHS ===== | ===== Using GHS ===== | ||
Before using GHS with MotoHawk, there are a few items to consider: | Before using GHS with MotoHawk, there are a few items to consider: | ||
* If targeted, the 5xx-based processors default to using GHS 3.6, although they work with later versions(4.2.1). | * If targeted, the 5xx-based processors default to using GHS 3.6, although they work with later versions (4.2.1). | ||
* The 55xx-based | * The 55xx-based processors default to using GHS 4.2.1 and will work with later versions but will not work with GHS 3.6. | ||
* '''If you are using GHS version 4.2.1''', you will need to specify the License Manager. To do this, you would create and set an environment variable GHS_LMWHICH and set its value to "elan."<BR> If you are not going to use the default compiler version you will need to set an environment variable. Set GHS_DIR to the directory which has the compiler you want to use; the default for 4.2.1 is "C:\GHS\ppc421" | * '''If you are using GHS version 4.2.1''', you will need to specify the License Manager. To do this, you would create and set an environment variable GHS_LMWHICH and set its value to "elan."<BR> If you are not going to use the default compiler version you will need to set an environment variable. Set GHS_DIR to the directory which has the compiler you want to use; the default for 4.2.1 is "C:\GHS\ppc421" (other versions follow this naming convention). | ||
* There is also a | * There is also a Toolchain block in MotoHawk that will allow you to select which compiler to use, if necessary. Find it using Simulink Library Browser; it is located in the MotoHawk -> Build library.<BR><BR> | ||
'''Note:''' | '''Note:''' To set an environment variable:<BR>In Windows, select Start -> (right-click) My Computer -> Properties -> Advanced tab -> Environment Variables, then click on New, and fill in the variable name and value, then click OK. | ||
===== Common GHS Issues ===== | ===== Common GHS Issues ===== | ||
*Matlab returns an error ===Green Hills Compiler License Not Available===<BR> | *Matlab returns an error '''===Green Hills Compiler License Not Available===<BR> | ||
#Check that GHS purple dongle is plugged in | #Check that the GHS purple dongle is plugged in | ||
#Check that GHS_DIR is pointing to the correct compiler directory | #Check that GHS_DIR is pointing to the correct compiler directory | ||
#Check that the license is installed correctly | #Check that the license is installed correctly | ||
*GHS 4.2.1 may not link correctly with MotoHawk if MH is installed in a path with spaces in the name | *GHS 4.2.1 may not link correctly with MotoHawk if MH is installed in a path with spaces in the name | ||
#Install MH in a path of desired drive without spaces | |||
==== GCC (Free)==== | ==== GCC (Free)==== | ||
There is a GCC version of the license downloadable for the MPC5XX and MPC55XX modules. Download the file from [[Required_Files]]. | There is a GCC version of the license downloadable for the MPC5XX and MPC55XX modules. Download the file from '''[[Required_Files|Required Files]]'''. | ||
=====Using GCC with MotoHawk===== | =====Using GCC with MotoHawk===== | ||
Be careful to select the correct version of GCC for your target and version of MotoHawk. Your program will not run correctly if the wrong compiler toolchain is selected. | Be careful to select the correct version of GCC for your target and version of MotoHawk. Your program will not run correctly if the wrong compiler toolchain is selected. | ||
::*GCC PowerPC EABI SPE is for MPC55xx modules like the ECM-555x-112 module | ::*GCC PowerPC EABI SPE is for MPC55xx modules like the ECM-555x-112 module | ||
::*GCC PowerPC EABI (no SPE) is for MPC5xx modules such as the ECM565-128, ECM-555-80 and 48 pin modules for MotoHawk | ::*GCC PowerPC EABI (no SPE) is for MPC5xx modules such as the ECM565-128, ECM-555-80 and 48-pin modules for MotoHawk | ||
'''MPC5xx''' | '''MPC5xx''' | ||
The | The MPC5XX micro uses either the GCC eabi SPE 4.6, or GHS 4.2.1 and 4.2.4. | ||
GCC PowerPC EAB Version 4.6 works for MotoHawk 2011b and on | |||
GCC PowerPC EABI Version 4.4.0 SP1 works for MotoHawk 2009b, 2010a - 2011a | GCC PowerPC EABI Version 4.4.0 SP1 works for MotoHawk 2009b, 2010a - 2011a | ||
'''MPC55xx''' | '''MPC55xx''' | ||
GCC PowerPC EABI Version 4.3.3 works for 2009a | GCC PowerPC EABI Version 4.3.3 works for 2009a | ||
GCC PowerPC EABI SPE Version 4.6 works for 2011b and on | |||
GCC PowerPC EABI SPE Version 4.4.0 SP1 works for 2009b, 2010a - 2011a | GCC PowerPC EABI SPE Version 4.4.0 SP1 works for 2009b, 2010a - 2011a | ||
=====GCC win32-pe and win64-pe===== | =====GCC win32-pe and win64-pe===== | ||
The | The programs GCC win32-pe and GCC win64-pe are installed by MotoHawk. These two programs integrate with the GCC compilers the customer can install and allows them to work. The win32-pe is on all instaltions, and the win64-pe is installed on MotoHawk versions that can work on 64-bit machines. As such, they should never be deleted. | ||
One common issue with these files is sometimes MotoHawk does not properly install/uninstall them. If that happens you will get an error saying that win32-pe is not found upon building a model, and the build will fail. If this happens on a Vista OS you can try installing this | One common issue with these files is sometimes MotoHawk does not properly install/uninstall them. If that happens you will get an error saying that win32-pe is not found upon building a model, and the build will fail. If this happens on a Vista OS, you can try installing this '''[https://wiki.neweagle.net/ProductDocumentation/MotoTron/MotoHawk/MinGW_5_1_3.zip Vista Patch]'''. If you have a 64-bit OS, see '''[[Required Files#Compilers|Compilers]]'''. Note that you will need a password to login to the required files section. If neither of these solutions work, or you have a different OS than the patches provided, manually uninstall every program associated with MotoHawk (including MotoHawk, MotoHawk Licensing, GCC compilers, etc.), especially the GCC Win32-PE program. Then reinstall everything, first the compilers, then MotoHawk. | ||
====CodeWarrior Compiler==== | ====CodeWarrior Compiler==== | ||
| Line 582: | Line 578: | ||
=====CodeWarrior Installation===== | =====CodeWarrior Installation===== | ||
To install the CodeWarrior application from a CD: | To install the CodeWarrior application from a CD: | ||
# Insert CD in drive. Click Start > Run and double | # Insert CD in drive. Click Start -> Run and double click on Setup.exe. Follow on-screen instructions. (Try to leave the default install directory.) | ||
=====Using CodeWarrior===== | =====Using CodeWarrior===== | ||
| Line 588: | Line 584: | ||
*If you are not going to use the default compiler version you will need to set an environment variable. Set CW_DIR to the directory which uses the compiler you want to use; the default for 4.7 is "C:\Program Files\Freescale\CodeWarrior for HCS12 V4.7" (other versions follow this naming convention). | *If you are not going to use the default compiler version you will need to set an environment variable. Set CW_DIR to the directory which uses the compiler you want to use; the default for 4.7 is "C:\Program Files\Freescale\CodeWarrior for HCS12 V4.7" (other versions follow this naming convention). | ||
*There is also a '''[ | *There is also a '''[[Build_Blocks|MotoHawk Tool Chain Definition]]''' block that will allow you to choose which compiler to use, if necessary. Find it using Simulink Library Browser; it is located in MotoHawk -> Build library. | ||
'''Notes''': | '''Notes''': | ||
* To set an environment variable in Windows, select | * To set an environment variable in Windows, select Start -> (Right-Click) My Computer -> Properties -> Advanced tab -> Environment Variables, then click on New, and fill in the variable name and value, then click OK. | ||
* If your application model does not build because it cannot find the path for your CodeWarrior license, you may need to create a custom path in your '''[ | * If your application model does not build because it cannot find the path for your CodeWarrior license, you may need to create a custom path in your '''[[Build_Blocks|MotoHawk Tool Chain Definition]]'''. See CodeWarrior toolchain examples below: | ||
{| | {| | ||
| Line 601: | Line 597: | ||
=== Mex File Compiler === | === Mex File Compiler === | ||
To work with component blocks you need to install a mex compiler. On most versions of 32 bit | To work with component blocks, you need to install a mex compiler. On most versions of 32-bit MATLAB, that compiler already comes with the software, but it must be selected. To select a mex compiler, or to make sure you have one, type '''>>mex-setup''' into your MATLAB command line. At that point you will be asked if you want to find and install a mex compiler. If the generic LCC-win32 compiler is already on your machine it will come up as an option. However, if the option that comes up is none, you will have to install a compiler. To do so, search Mathworks' website for the compatible compilers for the version of MATLAB used. For each version of MATLAB that needs a compiler, they list compatible compilers and give links to download them. If you run into errors will building the component model, after the compilers are installed, you might need a Mathworks software patch. This '''[http://www.mathworks.com/support/tech-notes/1600/1605.html?s_eid=partnerNEWEAGLE Mathworks page]''' is a good starting point for installation and troubleshooting errors. | ||
Latest revision as of 21:29, 16 January 2025
New Eagle > Products Wiki > MotoHawk Platform > MotoHawk > MotoHawk FAQ
Installing MotoHawk
Prerequisites
MathWorks required products:
- MATLAB
- Simulink
- Stateflow (optional, but highly recommended - may be required for some MotoHawk libraries)
- Embedded Coder (formerly Real Time Workshop Embedded Coder + others)
- MATLAB Coder (new for MATLAB 2011a)
- Simulink Coder (formerly Real Time Workshop + Stateflow Coder)
- Stateflow Coder (only for MATLAB 2010b and earlier)
Side-by-Side Installer
Older versions of MotoHawk only allowed one version of MotoHawk to be installed at any given time. The MotoHawk Side-by-Side Installer, new with MotoHawk2010a, allows for many versions of MotoHawk to be installed at one time along with one legacy MotoHawk (MotoHawk2009bSP0 or earlier). Take, as an example, having one project in the final stages of development or already in production using MotoHawk 2009a and starting a new project and wanting to use the newest software. The Side-by-Side Installer allows you to have the two working environments installed at the same time and switch between them easily. To allow this easy change, the Side-by-Side Installer includes a MotoHawk Version Selector which allows you to select which version of MotoHawk will run with a specific version of MATLAB.
Changes to Installation and Use Procedures

Installation
- Old
- Use Add/Remove programs to uninstall any previous versions of MotoHawk.
- Run installer and select the versions of MATLAB with which to integrate MotoHawk.
- New
- Run installer to install MotoHawk. At the end, there is a prompt to launch the MotoHawk Version Selector.
Use
- Old
- Launch MATLAB and it will start MotoHawk if it was integrated at installation.
- New
- Use MotoHawk Version Selector to integrate a version of MATLAB with a version of MotoHawk.
- Launch MATLAB and it will start the version of MotoHawk with which it was integrated.
Using MotoHawk Version Selector

The Side-by-Side Installer also installs the MotoHawk Version Selector tool. To get to this program, go to Start -> All Programs -> Woodward -> MCS -> MotoHawk -> MotoHawk Version Selector. After you have selected the MATLAB and MotoHawk versions, launching the selected versions of MATLAB will launch MotoHawk.
Select MATLAB Version
The top has a dropdown list titled "MATLAB Version." This dropdown will list all versions of MATLAB on the machine. Select the version of MATLAB for which you want to change the MotoHawk version or select the checkbox below labeled "Use same MotoHawk Toolbox for all MATLAB versions." Note that not all MotoHawk versions will support all MATLAB versions, so the Side-by-Side installs may be grayed out if the checkbox is used.
Disabled
This radio button selection will allow MATLAB to launch without initializing any version of MotoHawk. It is also the default choice on MATLAB versions the most recent installer supports.
Side-by-Side Installation
All of the Side-by-Side installations will be listed in radio buttons in the Select MotoHawk Toolbox Version panel. Select the radio button next to the version you want to use, and it will integrate into the selected version of MATLAB.
Using Environment Variable MOTOHAWK_DIR
This feature uses the Environment Variable MOTOHAWK_DIR to point to the installation location of the version of MotoHawk you want to run. To change the environment variable, do the following:
- Windows XP
- Right click on "My Computer" and select properties
- Select the advanced tab
- Click the Environment Variables button at the bottom of the page
- Find MOTOHAWK_DIR and select the edit button or click the new button if MOTOHAWK_DIR does not already exist
- Change the Variable value to the directory MotoHawk is installed in (e.g., C:\Program Files\Woodward\MotoHawk)
- Windows Vista/Windows 7
- Right click on "My Computer" and select properties
- Select the Advanced System settings on the left side of the window
- Click the Environment Variables button at bottom of page
- Find MOTOHAWK_DIR and select the edit button or click the new button if MOTOHAWK_DIR does not already exist
- Change the Variable value to the directory MotoHawk is installed in (e.g., C:\Program Files\Woodward\MotoHawk)
Custom/Legacy MotoHawk Version
This radio button allows you to specify a path to the MotoHawk install directory.
Starting a New Project
Use the command in the MATLAB window >>motohawk_project('insert_name_here') to create a new project called "insert_name_here".
MotoHawk Blockset
The MotoHawk Blocks support many different behaviors including I/O, fault management, calibration, online viewing via calibration tools and many more.

MotoHawk Block Categories
Build Counter
How do I check the build version of a model?
At the MATLAB command prompt, type in motohawk_build_version('modelname') and it will return a three-digit number which indicates the build version of that model.
How do I reset the motohawk_build_version counter?
For instance, if I copy a model for a new project, I’d like to reset the build counter?
- There is a MotoHawk command to update this value. To do this, have the model open and go to the MATLAB command prompt and type in:
- >>number = ‘000’ The value between the ticks can be any number you want
- >>motohawk_build_version(bdroot, number) This will set the three-character build version to 000. You can also place the value directly into the expression; just remember to use the ticks(‘).
- >>number = ‘000’ The value between the ticks can be any number you want
- You can also type >>help motohawk_build_version from the command line and get help for more advanced features.
Using S Functions With MotoHawk
S functions are a useful tool to make custom blocks. They can also be used to protect your code from an end user. S functions can be written using .m files, C code or Fortran, with C code being the most common way. S functions require practice and knowledge of C, masking blocks (including how masks can handle some of the I/O), TLC and embedded C. That information can be acquired by reading the Simulink help. To help you make S functions work with MotoHawk, here is an example model and document to explain how to use it: Help With S Functions
Only inlined S functions as described in the presentation provided can be used with MotoHawk. If you wanted to use a non-inlined S function to protect IP, it is recommended that you use a component model, as component models have the ability to protect IP. Note: While it is possible to embed S functions into a MotoHawk model as the presentation shows, this is not, in general, supported or recommended by Woodward. The intent of MotoHawk is to allow the user to design in a model-based design environment. By using MotoHawk as a framework for embedding c-code, you are losing the power of the tool and of model-based design. We would recommend that S functions are considered only to implement small chunks of code that aren’t easily described in Simulink or Stateflow.
Common Errors
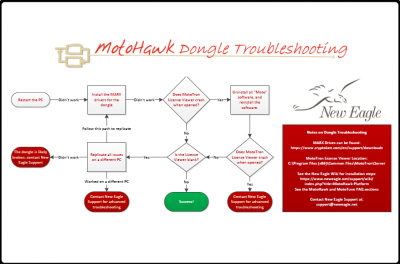
Dongle Issues
Dongle issues include but are not limited to:
- MotoTron License Viewer is blank or crashing
- MotoHawk/MotoTune licensing is not registering
- Light on the token now is lighting up
Click below for the dongle troubleshooting guide:
| Dongle Troubleshooting Guide |
|---|
|
|
Older Version Crashes
If you experience crashes when using newly installed older versions of MotoHawk, anything predating the most recent release, please follow these steps for troubleshooting:
- MotoHawk and MotoTron Licensing Viewer crash
- Please install the newest release of MotoHawk.
- This will install any newly released fixes for MotoHawk.
- After installing the newest release, use your regular MotoHawk version as normal.
- All Moto software is crashing, i.e., MotoHawk, MotoTune etc.
- A full re-installation of the Moto suite may be required.
- Please follow these steps for proper installation.
Pre-compile Errors

Errors generated during pre-compile can point to a target mismatch in the slprj/sfprj directory. These directories are generated by Simulink during the build. If the user is receiving pre-complile errors like the one above, deleting the current slprj and/or sfprj folders will give MathWorks a fresh start to rebuild them.
Build Errors
If you get the error message: Error using ==> motocoder_codegen at 78 and/or Error using ==> motohawk_make_rtw at 355 MotoCoder Build Failed, you probably have a path error. This error also throws up a warning in the build file that it is looking for a file and cannot find it. To fix this, make sure the path is correct. The MATLAB path is seen in the current folder window, located in the MATLAB command window. You want to make sure you are located in the folder that your model is in. You also want to make sure you get to this folder by clicking on and entering the folder, not just using the expand arrows until you can see it. Using the path is made easier by using the >>motohawk_project command which makes a new model with folders for libraries, CAN messaging, and .m files. There is a setup and close .m file which then handles the path management during builds. This manages the path without the need for manually adding files to the path. Also make sure you never manually add the build folder to the path; this can cause build errors. The path to the model cannot contain spaces. An example of a valid path to a model would be C:\DEV_AREA\test_lib. These errors will not normally be caught by compiling with Ctrl-D but will appear upon building the model.
Warning: OSS_VR_Input has an unsupported VR Interface selected in the design
In previous versions of MotoHawk, a build warning might appear when a frequency in block with a CNK pin and a VR interface is selected. This message is incorrect and should be ignored. This warning was removed in MotoHawk 2012a Beta 4.
Warning: Calibratable I/O for PWMOutput NOT supported in MotoCoder yet
When building a model for an ECM-OH, ECM-5554-112-0902/0904, or any of the S12 modules, a build warning may occur due to the "allow I/O pin to be calibrated" option from MotoTune being selected. In this instance, the build may complete but cause errors. Deselecting the option may solve the error. The warning stems from the fact that none of the mentioned controllers support the Calibratable IO function. The option to "allow I/O pin to be calibrated" has been removed from the block mask when these modules are selected in MotoHawk 2012b Beta 2 and higher.
Programming Error: Code:(4,4,6,-1) ECU refused connection due to incorrect token security

This error may occur when you try to program an *.srz file that was built with a newer version of MotoHawk. Upgrading to a newer version of MotoTune and MotoServer may solve the problem.
Target Definition Block
ECM5554-112 Target Definition
MotoHawk Target Definition Block target names to use:
- Use these targets for ECM-5554-112-0902-F00 ("PROD") and ECM-5554-112-0902-CP0 ("DEV") modules:
- ECM-5554-112-0902-kD: PCM0902 module with knock development interface, DV release hardware
- ECM-5554-112-0902-kP: PCM0902 module with knock development interface, PV release hardware
- ECM-5554-112-0902-xD: PCM0902 module, DV release hardware
- ECM-5554-112-0902-xP: PCM0902 module, PV release hardware
- Use this target for ECM-5554-112-0904-F00 ("PROD") and ECM-5554-112-0904-CP0 ("DEV") modules:
- ECM-5554-112-0904-xD: PCM0904 module, DV and PV release hardware
Note: If you cannot find the module in the target list, make sure you have your licensing dongle plugged in. This will unlock all of the modules to build to.
Software
MathWorks
Recommended installations:
- MATLAB
- Simulink
- Stateflow (optional, but highly recommended)
- MATLAB Coder (new for MATLAB2011a)
- Simulink Coder (formerly Real Time Workshop + Stateflow Coder)
- Embedded Coder (formerly Real Time Workshop Embedded Coder + others)
MotoServer/MotoTune
- License required
- With MotoHawk 2011aSP0 and later, MotoServer/MotoTune 8.13.7.145 or later is required
- With MotoHawk 2011aBeta3 and later, MotoServer/MotoTune 8.13.7.144 or later is required
- With MotoHawk 2011aBeta1 and later, MotoServer/MotoTune 8.13.7.141 or later is required
- With MotoHawk 2010aBeta6 and later, MotoServer/MotoTune 8.13.7.120 or later is required
- With MotoHawk 2009bBeta1 and later, MotoServer/MotoTune 8.13.7.087 or later is required
GCC Compiler
- GCC Compiler
- No license required
- MotoHawk 2009bBeta2 or later is required
- GCC 4.6 is used with MotoHawk 2011b and on
- GCC 4.4 is used with MotoHawk 2009b to 2011a and is not supported on 64-bit MATLAB installations
- GCC compilers work with 64-bit MATLAB for PowerPC targets. This includes the 40-, 80-, 112- and 128-pin modules.
- GCC Compiler
CANKing
- No license required
Latest Version of MotoHawk
The latest MotoHawk version is always available from Required Files. You must have an account on the New Eagle Wiki in order to download it.
Does Motohawk run on 64-bit software?
- If the operating system is 64-bit, then MotoHawk 2010a SP0 or later is required.
- If the MATLAB installation is 64-bit, then MotoHawk 2010b SP0 or later is required.
Some customers are using MotoHawk and MotoTune on Windows Vista 64-bit with MATLAB 32-bit. They report:
After installing MotoServerRuntime, MotoTune, and MotoHawk (using right-click install-as-administrator), copy the entire directory tree "C:\Program Files (x86)\MotoTron\..." to "C:\Program Files\MotoTron\..." (substitute "Woodward" for "MotoTron" for MotoHawk 2009b and later releases). When it is time to uninstall, remember to delete the "C:\Program Files\MotoTron\..." copy before uninstalling with Add/Remove Programs.
What are some known problems with running Motohawk on Windows Vista?
Dongle Driver
Windows Vista (32-bit) is known to have dongle driver problems.
Error 1925 (insufficient privileges)
This error occurs when the install process is not run as Administrator. In your web browser, right click on MotoHawk_[Version] and select 'Run as Administrator' rather than 'Open' or double-clicking.
MotoHawk Compatibility Matrix
MotoHawk Compatibility Matrix
| MATLAB Version | MotoHawk Version | ||||||||||||||||||||
|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|
| 2009a | 2009b | 2010a | 2010b | 2011a | 2011b | 2012a | 2012b | 2013a | 2013b | 2014a | 2014b | 2015a | 2015b | 2016a | 2016b | 2017a | 2017b | 2018a | 2018b | 2019a | |
| 7.4 (R2007a) | Yes | No | No | No | No | No | No | No | No | No | No | No | No | No | No | No | No | No | No | No | No |
| 7.5 (R2007b) | Yes | Yes | Yes | No | No | No | No | No | No | No | No | No | No | No | No | No | No | No | No | No | No |
| 7.6 (R2008a) | Yes | Yes | Yes | No | No | No | No | No | No | No | No | No | No | No | No | No | No | No | No | No | No |
| 7.7 (R2008b) | Yes | Yes | Yes | Yes | No | No | No | No | No | No | No | No | No | No | No | No | No | No | No | No | No |
| 7.8 (R2009a) | Yes | Yes | Yes | Yes | Yes | No | No | No | No | No | No | No | No | No | No | No | No | No | No | No | No |
| 7.9 (R2009b) | Yes | Yes | Yes | Yes | Yes | Yes | No | No | No | No | No | No | No | No | No | No | No | No | No | No | No |
| 7.9.1 (R2009bSP1) | No | No | No | No | Yes | Yes | No | No | No | No | No | No | No | No | No | No | No | No | No | No | No |
| 7.10 (R2010a) | No | No | Yes | Yes | Yes | Yes | Yes | No | No | No | No | No | No | No | No | No | No | No | No | No | No |
| 7.11 (R2010b) | No | No | No | Yes(*) | Yes | Yes | Yes | Yes | No | No | No | No | No | No | No | No | No | No | No | No | No |
| 7.11.1 (R2010bSP1) | No | No | No | Yes(*) | Yes | Yes | Yes | Yes | No | No | No | No | No | No | No | No | No | No | No | No | No |
| 7.11.2 (R2010bSP2) | No | No | No | No | No | No | Yes | Yes | No | No | No | No | No | No | No | No | No | No | No | No | No |
| 7.12 (R2011a) | No | No | No | No | Yes | Yes | Yes | Yes | Yes | No | No | No | No | No | No | No | No | No | No | No | No |
| 7.13 (R2011b) | No | No | No | No | No | Yes | Yes | Yes | Yes | Yes | No | No | No | No | No | No | No | No | No | No | No |
| 7.14 (R2012a) | No | No | No | No | No | No | Yes | Yes | Yes | Yes | Yes | No | No | No | No | No | No | No | No | No | No |
| 8.0 (R2012b) | No | No | No | No | No | No | No | Yes | Yes | Yes | Yes | Yes | No | No | No | No | No | No | No | No | No |
| 8.1 (R2013a) | No | No | No | No | No | No | No | No | Yes | Yes | Yes | Yes | Yes | No | No | No | No | No | No | No | No |
| 8.2 (R2013b) | No | No | No | No | No | No | No | No | No | Yes | Yes | Yes | Yes | Yes | No | No | No | No | No | No | No |
| 8.3 (R2014a) | No | No | No | No | No | No | No | No | No | No | Yes | Yes | Yes | Yes | Yes | No | No | No | No | No | No |
| 8.4 (R2014b) | No | No | No | No | No | No | No | No | No | No | No | Yes | Yes | Yes | Yes | Yes | No | No | No | No | No |
| 8.5.1 (R2015a) | No | No | No | No | No | No | No | No | No | No | No | No | Yes | Yes | Yes | Yes | Yes | No | No | No | No |
| 8.5 (R2015aSP1) | No | No | No | No | No | No | No | No | No | No | No | No | Yes(*) | Yes | Yes | Yes | Yes | No | No | No | No |
| 8.6 (R2015b) | No | No | No | No | No | No | No | No | No | No | No | No | No | Yes | Yes | Yes | Yes | Yes | No | No | No |
| 9.0 (R2016a) | No | No | No | No | No | No | No | No | No | No | No | No | No | No | Yes | Yes | Yes | Yes | Yes | No | No |
| 9.1 (R2016b) | No | No | No | No | No | No | No | No | No | No | No | No | No | No | No | Yes | Yes | Yes | Yes | Yes | No |
| 9.2 (R2017a) | No | No | No | No | No | No | No | No | No | No | No | No | No | No | No | No | Yes | Yes | Yes | Yes | Yes |
| 9.3 (R2017b) | No | No | No | No | No | No | No | No | No | No | No | No | No | No | No | No | No | Yes | Yes | Yes | Yes |
| 9.4 (R2018a) | No | No | No | No | No | No | No | No | No | No | No | No | No | No | No | No | No | No | Yes | Yes | Yes |
| 9.5 (R2018b) | No | No | No | No | No | No | No | No | No | No | No | No | No | No | No | No | No | No | No | Yes | Yes |
| 9.6 (R2019a) | No | No | No | No | No | No | No | No | No | No | No | No | No | No | No | No | No | No | No | No | Yes |
- (*) in SP1 only
- (A) in current beta
- (B) planned in future beta or service pack
- As of MotoHawk 2015a, the XCP slave blockset is located in MotoHawk and requires no additional license
Known Problems with Mathworks Software
There is a known MATLAB R2013b issue regarding how MATLAB handles info.xml files at startup. As a workaround to this issue, please unzip this patch in the MATLAB root directory; the root directory is the directory given as the output of the MATLABROOT command. Alternatively, you can delete any info.xml files in any directories on your path.
MotoHawk and Windows 8 Compatibility
Motohawk is compatible with Windows 8 starting with MotoHawk 2013b SP0. Older versions are not compatible.
Mototune and MotoService are compatible with Windows 8
MotoHawk and Windows 10 Compatibility
MotoHawk is compatible with Windows 10 starting with MotoHawk 2015b.
Known Issue
The MotoHawk installer will have an issue supporting multiple versions of MotoHawk on machines which do not previously have .NET 2.0 installed. If multiple versions of MotoHawk are intended, it is recommended to ensure .NET 3.0 SP1 (includes .NET 2.0) is installed before installing the first MotoHawk version.
Can I speed up the build on the ECM5554-112?
MotoHawk 2010a Beta 5 made improvements in this area to make the build times between 55xx and 5xx much closer.
Compilers
| Module/Family | Green Hills Compiler 3.6 | Green Hills Compiler 4.2.1 | Green Hills Compiler 4.2.4 | GCC 4.4.0SP1 | GCC 4.6.0 | CodeWarrior 4.6 |
|---|---|---|---|---|---|---|
| GCM-0S12-024 | X | |||||
| ECM-S12X-70 | X | |||||
| ECM-0S12-024 | X | |||||
| ECM-5554-112 | X | X | X | X | ||
| HCM-0563-48 | X | X | X | X | X | |
| GCM-0563-48 | X | X | X | X | X | |
| ECM-0563-48 | X | X | X | X | X | |
| GCM-0565-024 | X | X | X | X | X | |
| ECU-0565-128 | X | X | X | X | X | |
| ECU-0555-80 | X | X | X | X | X | |
| ECU-0555-48 | X | X | X | X | X | |
| ECM-3R | X | X | X | X | X |
HCS12X Metrowerks Compiler
There is a free version for the S12X compiler. We are looking for Beta testers to determine whether this will work or whether you need the professional version for $1995.
Freescale - HCS12X
December 2010 compiler update from Woodward
The GNU compiler is not supported for the S12 target modules. The cost of the CodeWarrior compiler only (basic) is fairly inexpensive compared to our effort to support the GNU toolchain for S12. Additionally, when we last looked into this, the XGATE support was not available.
MPC5XX/MPC55XX Compiler Options
Greenhills
The Greenhills PowerPC compiler is recommended for production programs. GHS 3.6 and 4.2.1 is on both the 5xx and 55xx MotoHawk controllers. Information on this compiler can be found at Greenhills compiler.
Greenhills Demo License
Greenhills compilers can be demonstrated for 30 days by downloading the software. After installing, go to Start/Multi…./Licensing/License Request Generator. It automatically takes you to the Greenhills website and requests the license. Typical turnaround is 24 hrs.
International GHS License
All licenses sold outside the USA, including Canada, must be International Dongle type. The Green Hills Compiler (GHS) is a compiler supported in MotoHawk for 5xx and 55xx processor targets. This is the recommended compiler.
Green Hills Compiler Installation
To install the GHS application from a CD:
- Insert CD in drive. Click Start -> Run and double click on Setup.exe.
Follow on-screen instructions. (Try to leave the default install directory.) - If you do not already have a license, launch the License Request Generator:
In Windows, select Start -> All Programs -> Multi2000, PowerPC v3.6 -> Licensing -> License Request Generator
You may want to request an evaluation license initially. This will help get you started faster. - If you have a license, run the license installer:
In Windows, select Start -> All Programs -> Multi2000, PowerPC v3.6 -> Licensing -> Install Licenses - Select your *.key file and then install all the licenses.
Using GHS
Before using GHS with MotoHawk, there are a few items to consider:
- If targeted, the 5xx-based processors default to using GHS 3.6, although they work with later versions (4.2.1).
- The 55xx-based processors default to using GHS 4.2.1 and will work with later versions but will not work with GHS 3.6.
- If you are using GHS version 4.2.1, you will need to specify the License Manager. To do this, you would create and set an environment variable GHS_LMWHICH and set its value to "elan."
If you are not going to use the default compiler version you will need to set an environment variable. Set GHS_DIR to the directory which has the compiler you want to use; the default for 4.2.1 is "C:\GHS\ppc421" (other versions follow this naming convention). - There is also a Toolchain block in MotoHawk that will allow you to select which compiler to use, if necessary. Find it using Simulink Library Browser; it is located in the MotoHawk -> Build library.
Note: To set an environment variable:
In Windows, select Start -> (right-click) My Computer -> Properties -> Advanced tab -> Environment Variables, then click on New, and fill in the variable name and value, then click OK.
Common GHS Issues
- Matlab returns an error ===Green Hills Compiler License Not Available===
- Check that the GHS purple dongle is plugged in
- Check that GHS_DIR is pointing to the correct compiler directory
- Check that the license is installed correctly
- GHS 4.2.1 may not link correctly with MotoHawk if MH is installed in a path with spaces in the name
- Install MH in a path of desired drive without spaces
GCC (Free)
There is a GCC version of the license downloadable for the MPC5XX and MPC55XX modules. Download the file from Required Files.
Using GCC with MotoHawk
Be careful to select the correct version of GCC for your target and version of MotoHawk. Your program will not run correctly if the wrong compiler toolchain is selected.
- GCC PowerPC EABI SPE is for MPC55xx modules like the ECM-555x-112 module
- GCC PowerPC EABI (no SPE) is for MPC5xx modules such as the ECM565-128, ECM-555-80 and 48-pin modules for MotoHawk
MPC5xx
The MPC5XX micro uses either the GCC eabi SPE 4.6, or GHS 4.2.1 and 4.2.4.
GCC PowerPC EAB Version 4.6 works for MotoHawk 2011b and on
GCC PowerPC EABI Version 4.4.0 SP1 works for MotoHawk 2009b, 2010a - 2011a
MPC55xx
GCC PowerPC EABI Version 4.3.3 works for 2009a
GCC PowerPC EABI SPE Version 4.6 works for 2011b and on
GCC PowerPC EABI SPE Version 4.4.0 SP1 works for 2009b, 2010a - 2011a
GCC win32-pe and win64-pe
The programs GCC win32-pe and GCC win64-pe are installed by MotoHawk. These two programs integrate with the GCC compilers the customer can install and allows them to work. The win32-pe is on all instaltions, and the win64-pe is installed on MotoHawk versions that can work on 64-bit machines. As such, they should never be deleted.
One common issue with these files is sometimes MotoHawk does not properly install/uninstall them. If that happens you will get an error saying that win32-pe is not found upon building a model, and the build will fail. If this happens on a Vista OS, you can try installing this Vista Patch. If you have a 64-bit OS, see Compilers. Note that you will need a password to login to the required files section. If neither of these solutions work, or you have a different OS than the patches provided, manually uninstall every program associated with MotoHawk (including MotoHawk, MotoHawk Licensing, GCC compilers, etc.), especially the GCC Win32-PE program. Then reinstall everything, first the compilers, then MotoHawk.
CodeWarrior Compiler
CodeWarrior is a compiler offered by Freescale that MotoHawk uses to compile S12x targets. This is currently the only supported compiler for S12x targets.
CodeWarrior Installation
To install the CodeWarrior application from a CD:
- Insert CD in drive. Click Start -> Run and double click on Setup.exe. Follow on-screen instructions. (Try to leave the default install directory.)
Using CodeWarrior
Before using CodeWarrior with MotoHawk, there are a few items to consider:
- If you are not going to use the default compiler version you will need to set an environment variable. Set CW_DIR to the directory which uses the compiler you want to use; the default for 4.7 is "C:\Program Files\Freescale\CodeWarrior for HCS12 V4.7" (other versions follow this naming convention).
- There is also a MotoHawk Tool Chain Definition block that will allow you to choose which compiler to use, if necessary. Find it using Simulink Library Browser; it is located in MotoHawk -> Build library.
Notes:
- To set an environment variable in Windows, select Start -> (Right-Click) My Computer -> Properties -> Advanced tab -> Environment Variables, then click on New, and fill in the variable name and value, then click OK.
- If your application model does not build because it cannot find the path for your CodeWarrior license, you may need to create a custom path in your MotoHawk Tool Chain Definition. See CodeWarrior toolchain examples below:

|

|
Mex File Compiler
To work with component blocks, you need to install a mex compiler. On most versions of 32-bit MATLAB, that compiler already comes with the software, but it must be selected. To select a mex compiler, or to make sure you have one, type >>mex-setup into your MATLAB command line. At that point you will be asked if you want to find and install a mex compiler. If the generic LCC-win32 compiler is already on your machine it will come up as an option. However, if the option that comes up is none, you will have to install a compiler. To do so, search Mathworks' website for the compatible compilers for the version of MATLAB used. For each version of MATLAB that needs a compiler, they list compatible compilers and give links to download them. If you run into errors will building the component model, after the compilers are installed, you might need a Mathworks software patch. This Mathworks page is a good starting point for installation and troubleshooting errors.